|
A Cognition Briefing Contributed by: Giovanni Pezzulo, ISTC-CNR, Rome, Italy.
Anticipatory Systems
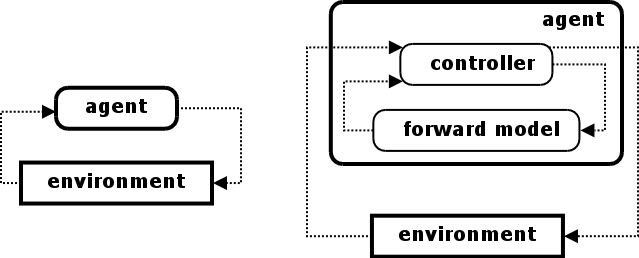
''... a system containing a predictive model of itself and/or its environment, which allows it to change state at an instant in accord with the models predictions pertaining to a latter instant.'' Or, more precisely, ''An anticipatory system S2 is one which contains a model of a system S1 with which it interacts. This model is a predictive model; its present states provide information about future states of S1. Further, the present state of the model causes a change of state in other subsystems of S2; these subsystems are (a) involved in the interaction of S2 with S1, and (b) they do not affect (that is, are unlinked to) the model of S1. In general, we can regard the change of state in S2 arising from the model as an adaptation, or pre-adaptation, of S2 relative to its interaction with S1.'' It is evident from this definition that the most peculiar aspect of anticipatory systems is thus their dependence on (predicted) future states and not only on past states (like reactive systems).
Prediction vs. Anticipation
Prediction is a representation of a particular future event. Anticipation is a future-oriented action, decision, or behavior based on a (implicit or explicit) prediction. Another relevant distinction is among two kinds of anticipatory systems: (1) those which internally predict and represent future states (a form of ''explicit'' anticipation) and (2) those which not, and simply coordinate their behavior with future states without representing them (a form of ''implicit'' anticipation). Here we are mainly interested in the first form of anticipation.
The Power of Anticipation: From Reactivity to Proactivity
On the contrary, anticipatory systems (endowed with predictive capabilities) can use the following rule: ''If the car in front of you is close to a crossing, then it is likely to stop, so stop in advance or at least get ready to stop when a crossing is ahead.'' Thus, a system endowed with predictive capabilities can take into account (possible) future events to decide on and prepare current behavior. Predictive capabilities permit even much more subtle behavior. Anticipatory systems can, for example, select an action whose anticipated effect is judged to be positive, prevent dangers before experiencing them, actively search for information that is expected to be relevant, etc. All these capabilities, which are based on processing information relative to the future, are common in many animals. Overall, the capability to coordinate their actions with the future and not only the present make animals increasingly proactive and autonomous thanks to their Anticipator capabilities can be therefore equally important in artificial systems research, and in particularly for the passage from mere reactivity to proactivity and goal-oriented behavior.
Some examples of anticipatory capabilities in living organisms
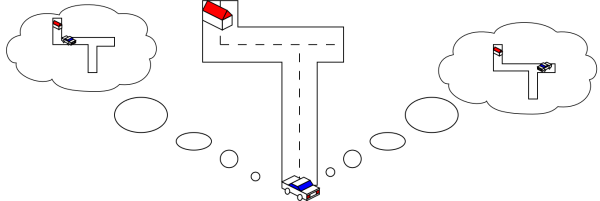
Visual attention is also greatly influenced by expectations as testified by classic experiments. Yarbus (1967), for example, showed that a visual scene is scanned differently depending on the observers intentions. This influence of expected stimuli for orienting attention has been reported not only in humans, but also in pigeons (Roitblat, 1980) and monkeys (Colombo and Graziano, 1994). The constructive and active aspects of perception, and in particular the top-down influences, are discussed in detail in Engel et al. (2001). On this basis, models of the visual apparatus including (hierarchical) predictions have been proposed such as predictive coding (Rao and Ballard, 1999) and prospective coding (Rainer et al., 1999). More complex anticipatory capabilities, which are referred to as ''mental simulations'', permit the prediction and processing of expected stimuli in advance. For example, Hesslow (2002) describes how rats are able to ''plan in simulation'' and compare alternative paths in a T-maze before acting in practice. This capability can be implemented by means of the above described internal forward models. While internal models typically run on-line with action to generate predictions of an action's effects, in order to produce mental simulations they can be run off-line, too, i.e., they can 'chain' multiple short-term predictions and generate lookahead predictions for an arbitrary number of steps. By 'simulating' multiple possible course of events and comparing their outcomes, and agent can select 'the best' plan in advance (see picture below).
Mental simulation can also be used for the prediction of danger. Damasio (1994) argues that during decision making humans engage in ''what-if'' simulated loops of interaction with the environment in order to evaluate in advance, via somatic markers, possible negative consequences of their actions. See Grush (2004) for a theory of representation based on the idea of ''emulation'' of the environment. Constructivists such as Piaget (1954) have argued that sensorimotor schemas, which enable the prediction of action effects, are progressively developed by means of an active exploration and interaction with the environment, leading to understanding and categorization. The view of situated activity as the basis of cognition, including conceptualization, has been recently revitalized and ''motor approaches'' to cognition are gaining popularity. One piece of evidence that understanding comes from activity and exploration comes from an experiment performed by Held and Hein (1963): Kittens that were unable to move autonomously in the environment (i.e., those being only passively moved) failed to categorize it correctly, being, for example, unable to avoid cliffs, which shows that they did not develop appropriate depth perception. On the other hand, kittens that were raised similarly (they essentially had nearly the same perceptual input) but that had the possibility to move showed successful categorization and depth perception.
References
Pezzulo, G. (2008). Coordinating with the future: the anticipatory nature of representation. Minds and Machines, 18(2):179225. Pezzulo, G., Butz, M.V., Castelfranchi, C., Falcone, R. editors (in press) The Challenge of Anticipation: A Unifying Framework for the Analysis and Design of Artificial Cognitive Systems. Springer LNAI 5225. Rosen, R. (1985). Anticipatory Systems. Pergamon Press. This briefing is based on some sections of the article "To Afford or Not to Afford: A New Formalization of Affordances Toward Affordance-Based Robot Control", Erol Sahin, Maya Çakmak, Mehmet R. Dogar, Emre Ugur and Göktürk Üçoluk, Adaptive Behavior, Vol. 15, No. 4, 447-472 (2007) DOI: 10.1177/1059712307084689 available at: http://adb.sagepub.com/cgi/content/abstract/15/4/447. The article is put on-line here under the conditions of "fair use" listed at http://adb.sagepub.com/policies/terms.dtl .
|