



|
A Cognition Briefing Contributed by: Paolo Arena and Luca Patanè, DIEES, University of Catania, Italy.
Cellular Nonlinear Networks Basics
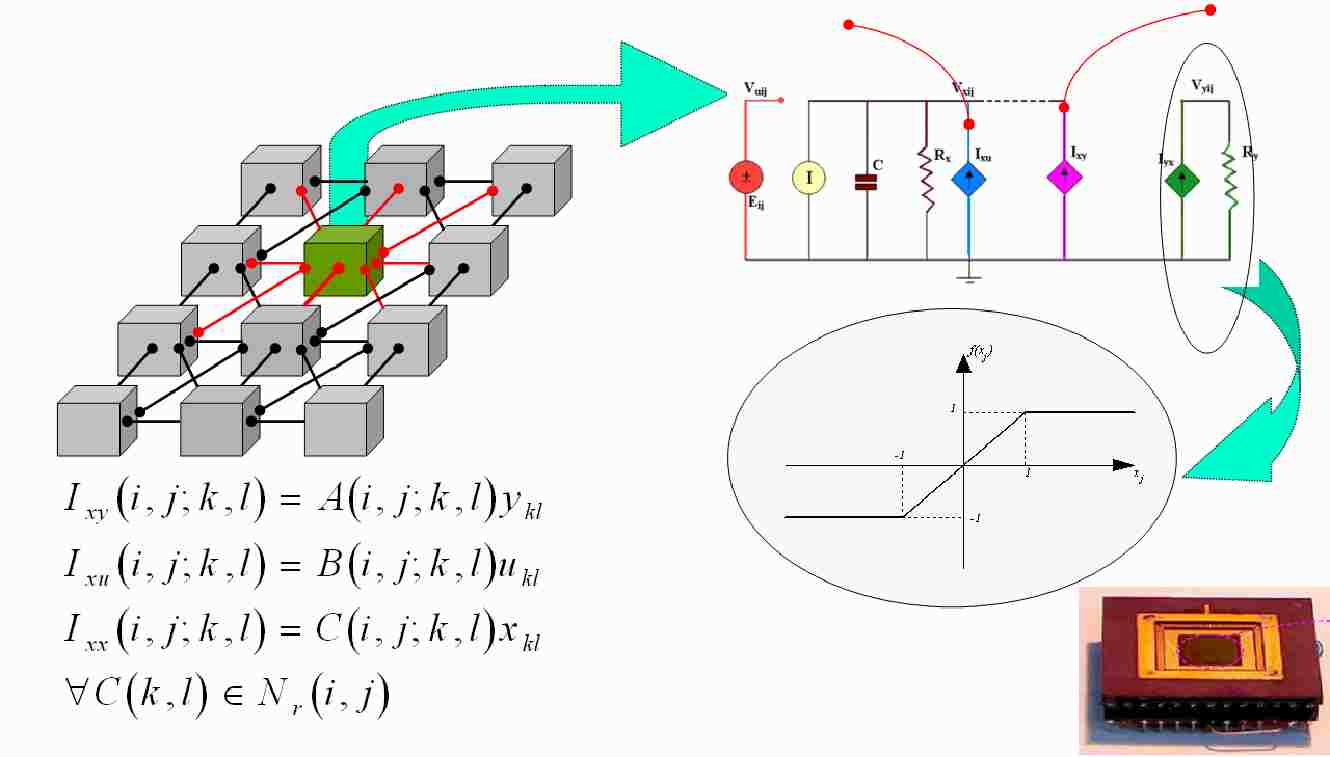
Figure 1: The Cellular Nonlinear Network scheme and main characteristics Due to the ever increasing number of different applications, the initial definition of the CNN was subsequently generalized as an array of mainly identical nonlinear circuits called cells, mainly locally connected through static or dynamic (including delay) connections, collected into cloning templates. This phase, being realized in an analog array, takes place in real time, making CNNs a paradigm for the real time study of non linear complex dynamics.
The CNN Universal machine
Application of CNNs to model bio-inspired locomotion
Modelling action-oriented perception through CNNs
Internal states (i.e. Turing Patterns) are the core of the perceptual process since they link sensing to action. They, on the one hand, are the result of the dynamic processing of incoming input stimuli and, on the other hand, represent different ways to interact with the environment. To meet these tasks, we use a CNN as dynamical system and consider Turing patterns as internal states. In particular we use a two-layer four by four Reaction-Diffusion-CNN (with zero-flux boundary conditions) with appropriate parameters to generate Turing patterns. Each pattern is associated with an action by means of a simple reinforcement learning. To perform its task, the robot is provided with no a priori knowledge and learns by means of trial and error, according to the experiments on Classical and Operant Conditioning. The learning is implemented by two mechanisms: an unsupervised learning acts at the sensing block allowing the system to modulate the basins of attraction of the Turing patterns, while a simple reward-based reinforcement learning is devoted to build up the association between Turing patterns and actions. The latter is based on a simplified version of the traditional Motor Map (MM) algorithm. The set of actions to be performed by the robot is not a priori established, instead it is the result of a simple, but effective learning mechanism, which improves the plasticity of the methodology. The sensing-perception-action loop is modeled by using nonlinear dynamical systems like CNNs, exploiting their real-time implementation. The unsupervised learning algorithm has been introduced between the input sensors and the RD-CNN for the dynamical modulation of basins of attraction associated with Turing patterns. Moreover we have designed and used an oversimplified version of the MM, and added a contextual layer to support higher level navigation strategies. In the case of navigation in unstructured environment, the navigation task in a physical space is mirrored into a navigation, in the robot brain, through a sequence of basins of attraction, each one corresponding to a particular behavior that has to be performed by the robot, in order to fulfill its mission. An interesting fact is that the cell structure generating wave fronts for locomotion control is structurally equal to that one generating Turing patterns. The two dynamics are obtained simply by a parameter modulation, in strict analogy with biological neurons, which attain different dynamics, although being structurally equivalent. The perceptual architecture was implemented in an FPGA based board architecture for the sake of simplicity and possibility to optimise the structure, but in the near future it is envisaged to have the structure within a whole analog circuit, devoted to generate both the perceptual states and the low level locomotion commands for the robot actuators. Several robotic platforms were also designed and built to act as test beds for the proposed methodology, currently under further assessment and refinement.
References
L.O. Chua and L. Yang, Cellular Neural Networks: Theory, IEEE Trans. On Circuits and Systems I Vol. 35 (1988), pp. 1273-1290. T. Roska, L. Chua, The CNN Universal Machine: An Analogic Array Computer, IEEE Trans. on Circuits and Systems-II, 40(3): 163-172, 1993. T. Roska and L. O. Chua, The CNN Universal Machine: 10 Years Later, Journal of Circuits, Systems, and Computers, Intl Journal of Bifurcation and Chaos, 12(4):377-388, 2003. L.Goras and L. O. Chua, Turing Patterns in CNNs Part I, II. IEEE Trans. Circuits and Systems I, Vol. 42 (1995), pp. 602-626. P. Arena, A. Basile, L. Fortuna, M. E. Yalcin, and J. Vandewalle, Watermarking for the Authentication of Video on CNN-UM, Int Workshop on Cellular Neural Networks and Their Applications, 2002. P. Arena (Editor), Dynamical Systems, Wave-based computation and Neuro-Inspired Robots, Springer Wien New York, 2008. P. Arena and L. Patanè (eds), Spatial Temporal Patterns for Action Oriented Perception in Roving Robots, Cognitive Systems Monographs Vol. 1, Springer (March 2009), ISBN: 978-3-540-88463-7. P. Arena, P. Crucitti, L. Fortuna, M. Frasca, D. Lombardo, L. Patanè, Turing patterns in RD-CNNs for the emergence of perceptive states in roving robots Int. J. Bifurcation and Chaos, Vol. 17, No.1 (2007), pp. 107-127. P. Arena, L. Fortuna, D. Lombardo, L. Patanè, Perception for action: Dynamic spatiotemporal patterns applied on a roving robot, Adaptive Behavior 2008, Vol. 16 N. 2/3, pp.101-121. P. Arena, S. De Fiore, L. Fortuna, M. Frasca, L. Patané and G. Vagliasindi, Reactive navigation through multiscroll systems: from theory to real-time implementation, Autonomous Robots, Special Issue on Bio-Inspired Sensory-Motor Coordination, Volume 25, Numbers 1-2 / 2008, pp. 123-146 P Arena, P. Crucitti, L. Fortuna, M. Frasca, D. Lombardo and L. Patane, Turing patterns in RD-CNNs for the emergence of perceptive states in roving robots Int. J. Bifurcation and Chaos, Vol. 17, No.1, pp. 107-127, 2007. M. Pavone, P. Arena and L. Patanè, An Innovative Mechanical and Control Architecture for a Biomimetic Hexapod for Planetary Exploration, Space Technology, 2006, VOL 26; NUMB 1/2, pages 13-24 P. Arena, L. Fortuna, M. Frasca, G. Vagliasindi, A wave-based CNN generator for the control and actuation of a lamprey-like robot, Int. J. Bifurcation and Chaos, vol. 16, no. 1, pp. 39-46, 2006. P. Arena, L. Fortuna, M. Frasca, L. Patané, A CNN-based chip for robot locomotion control, IEEE Transactions On Circuits And SystemsI: REGULAR PAPERS, Vol. 52, No. 9, Sept 2005, pp. 1862-1871. P. Arena, L. Fortuna, M. Frasca, G. Sicurella, An adaptive, self-organizing dynamical system for hierarchical control of bio-inspired locomotion, IEEE Transactions on Systems, Man and Cybernetics, Part B, Vol. 34, No. 4, August 2004, pp. 1823-1837. P. Arena, H. Cruse, M. Frasca, Cellular Nonlinear Network-Based Bio-Inspired Decentralized Control of Locomotion for Hexapod Robots Adaptive behavior Journal, 2002, Vol.10 (2):97-111. P. Arena, L. Fortuna, M. Branciforte, Reaction-Diffusion CNN Algorithms to Generate and Control Artificial Locomotion, IEEE Transaction on Circuits and Systems, I: Fundam. Theory and Applic., Vol. 46 N°2 (1999), pp.259-266 P. Arena, A Mechatronic Lamprey controlled by Analog Circuits, Proc. MED01 9th IEEE Mediterranean Conference on Control and Automation, June 27-29 Dubrovnik, Croatia. M. Pavone, P. Arena, L. Fortuna, M. Frasca, L. Patané, Climbing Obstacle in Bio-robots via CNN and Adaptive Attitude Control, Int. J. Circuit Theory and Applications, vol. 34, no. 1, pp. 109-125, 2006. M. Frasca, P. Arena, and L. Fortuna, Bio-Inspired Emergent Control Of Locomotion Systems, World Scientific Series on Nonlinear Science, Series A Vol. 48 (2004) ISBN 981-238-919-9. P. Arena, L. Fortuna, M. Frasca, Attitude control in walking hexapod robots: an analogic spatio-temporal approach, Int. J. On Circuit Theory and Appls. , Vol.30 (2002) pp.441-458. G. Manganaro, P. Arena, and L. Fortuna, Cellular Neural Networks: Chaos, Complexity and VLSI processing, Springer-Verlag, 1999. A.M. Turing, The chemical basis of Mophogenesis, Phil .Trans. Roy. Soc. London. B237 (1952), pp. 37 -68 P.F.M.J. Verschure, T. Voegtlin, R.J. Douglas, Environmentally mediated synergy between perception and behaviour in mobile robots. Nature, 425 (2003), pp. 620-624. A. Rodríguez-Vázquez, G. Liñán-Cembrano, L. Carranza, E. Roca-Moreno, R. Carmona-Galán, F. Jiménez-Garrido, R. Domínguez-Castro, and S. Meana, ACE16k: The Third Generation of Mixed-Signal SIMD-CNN ACE Chips Toward VSoCs, IEEE Trans. on Circuits and Systems I, 51(5): 851-863, 2004. A. Zarandy and C. Rekeczky, Bi-i: a standalone ultra high speed cellular vision system, IEEE Circuits and Systems Magazine, 5(2):36-45, 2005. D. Vilarino and C. Rekeczky, Implementation of a Pixel-Level Snake Algorithm on a CNNUM-Based Chip Set Architecture, IEEE Trans. On Circuits And Systems I, 51(5): 885-891, 2004. C. Niederhoefer and R. Tetzlaff, Prediction Error Profiles allowing a Seizure Forecasting in Epilepsy?, Int. Workshop on Cellular Neural Networks and Their Applications, 2006. A. Adamatzky, P. Arena, A. Basile, R. Carmona-Galán, B. Costello, L. Fortuna, M. Frasca, and A. Rodríguez-Vázquez, Reaction-Diffusion Navigation Robot Control: From Chemical to VLSI Analogic Processors, IEEE Trans. On Circuits And Systems I, 51(5):926-938, 2004. M. Gilli, F. Corinto, and P. Checco, Periodic Oscillations and Bifurcations in Cellular Nonlinear Networks, IEEE Trans. on Circuits and Systems I, 51(5):948-962, 2004.
External Links
EU Project SPARK II Spatio-temporal Patterns for Action-oriented Perception in Roving Robots: an insect brain computational model http://www.spark2.diees.unict.it Cellular Neural Networks on Wikipedia http://en.wikipedia.org/wiki/Cellular_neural_network
Notes
|