|
A Cognition Briefing Contributed by: Giovanni Pezzulo, ISTC-CNR, Rome, Italy
Introduction
Traditionally action control is believed to be organized hierarchically (Weiss, 1941). Consider the action of writing a sentence. A motor hierarchy is responsible for converting this idea in the appropriate muscle activity. There is one level of organization that includes the decision of which sentence to write, and where. Another level of organization includes concatenating simpler actions such as taking a pen and paper, and then write. Another level of organization includes drawing single letters. This can be further specified as drawing vertical lines, horizontal lines, etc. Further, another level is the organization of the motor actions in the muscles: contract the brachioradialis, etc. There is evidence that also in the brain this hierarchical organization exists, and brain areas specialized for the planning and control of sub-components of actions exist; see (Prescott et al., 1999). Given this complex organization, one may ask where in this hierarchy different kinds of actions are initiated. Other relevant questions are how does the process of selecting, activating and controlling an action functions, and whether a single single selection or general executive component exist. Action selection is extensively reviewed in Tyrrell (1993) and in a white paper by Brom and Bryson. Here we focus instead on action control and execution in the case of voluntary and routine activity.
The Norman and Shallice Model
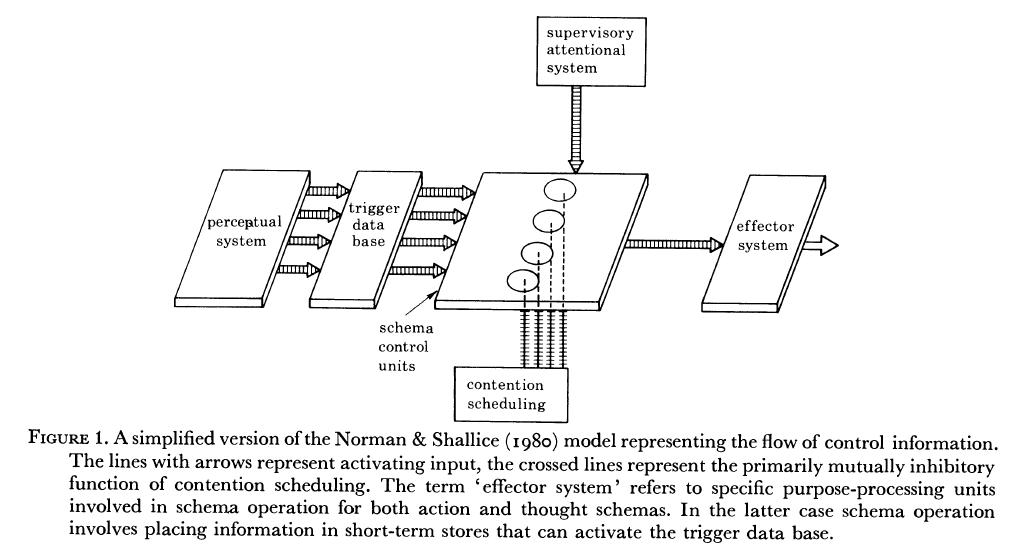
Automatic control consists in the activation of routines and habits. Behavior is guided by sensorimotor ''schemas'' that compete and cooperate, and are selected depending on the cues and affordances in the environment, as well as on internal motivations and drives. For example, we can almost effortlessly perform routine operations such as avoiding a chair when moving, opening a door, writing a sentence or two, etc. All these tasks are performed by us in many cases without awareness, and we are not surprised that our muscles coordinate exactly for doing what we have in mind. This is the simplest form of action control, and for this reason it is supposed to be available to several organisms and not only to humans. Further evidence for control by schemas and habits in humans comes from slips of action: it can happen that during a planned action (say, driving to the beach) another, more familiar action pattern (say, driving to the office) interferes and the result is taking the wrong route. At the automatic level schema selection is operated by a mechanism referred (in the figure) as ''contention scheduling''. Since cognitive resources and the effectors are limited (e.g., an agent can not go on the left and on the right at the same time), it selects a restricted numbers of compatible schemas so that they take control: hopefully, the most relevant schemas are selected at the right time. These schemas then operate until their task is achieved or a much higher priority schema is triggered. Norman and Shallice (1986) propose however that not all behavior functions in that way, and that a single, general executive component is not sufficient for explaining actions. There are in fact two problems. First of all, not all situations are routine. While schemas can account well the achievement of routine tasks, novel tasks require more complex cognitive operations, such as for example a general planning component that can in principle be applied to any problem domain. The second problem is that, even if each single part of an action can be a routine, how to concatenate and organize several schemas can be tricky and not routine. This is where ''willed control'' comes into play. It uses an attentionally limited controller, the supervisory activating system (SAS), that is responsible for more complex cognitive operations and in general intervenes when routine control is insufficient. It can organize, coordinate and monitor (with attention and awareness) schemas in order to achieve novel and complex tasks, acting as general-purpose planning component that can also adapt to novel domains. The supervisory attentional system (SAS) is highly related to the concept of working memory (WM) in Baddeley and Hitch (1974) and in particular to its main component, the central executive. It is also related to the concept of intention as used in (Bratman, 1987), and to awareness and consciousness in the global workspace theory (Baars, 1988). Shallice (1982) studied impairments of complex action planning (in SAS) is patients with frontal lobe damage. Although these patients were able to perform individually several actions, they had problems in coordinating them, perseverating, and often get distracted. Evidence for a distinction between automatic, habitual control and attentional, supervisory control is also reported extensively in social psychology. Bargh and Chartrand (1999); Bargh and Ferguson (2000) reported that often people are unaware of habits that are socially determined and guide their behavior. People for example imitate face expressions and body postures, and tune their actions (e.g., speed of walking) depending on habits and stereotypes.
Related Models
Challenges
References
Baddeley, A. and Hitch, G. (1974). Working memory. In Bower, G., editor, The Psychology of Learning and Motivation, pages 4789. Academic Press. Bargh, J. A. and Chartrand, T. L. (1999). The unbearable automaticity of being. American Psychologist, 54:462479. Bargh, J. A. and Ferguson, M. J. (2000). Beyond behaviorism: On the automaticity of higher mental processes. Psychological Bulletin, 126:925945. Baumeister, R. F., Bratslavsky, E., Muraven, M., and Tice, D. M. (1998). Ego-depletion: is the active self a limited resource? J. Personality Soc. Psychol., 74:12521265. Bratman, M. (1987). Intentions, Plans, and Practical Reason. Harvard University Press. Minsky, M. (1988). The Society of Mind. Simon & Schuster. Norman, D. A. and Shallice, T. (1986). Attention to action: Willed and automatic control of behaviour. In Davidson, R. J., Schwartz, G. E., and Shapiro, D., editors, Consciousness and Self-Regulation: Advances in Research and Theory. Plenum Press. Prescott, T. J., Redgrave, P., and Gurney, K. (1999). Layered control architectures in robots and vertebrates. Adapt. Behav., 7(1):99127. Redgrave, P., Prescott, T. J., and Gurney, K. (1999). The basal ganglia: a vertebrate solution to the selection problem? Neuroscience, 89:10091023. Shallice, T. (1982). Specific impairments of planning. Royal Society of London Philosophical Transactions Series B, 298:199209. Singh, P. and Minsky, M. (2005). An architecture for cognitive diversity. In Davis, D., editor, Visions of Mind. Idea Group Inc., London. Sloman, A. (2001). Varieties of affect and the cogaffarchitecture schema. In Johnson, C., editor, Proceedings Symposium on Emotion, Cognition,and Affective Computing AISB01, pages 3948. Tyrrell, T. (1993). Computational Mechanisms for Action Selection. PhD thesis, University of Edinburgh. Weiss, P. (1941). Self-differentiation of the basic patterns of coordination. Comparative Psychology Monographs, 17(4).
|